کاربردهای بینایی کامپیوتری در کشاورزی نیز بهسرعت در حال پیشرفت است. در ادامه ما به برخی از سؤالات اساسی در مورد ماهیت بینایی کامپیوتری پاسخخواهیم داد و در مورد کاربردهای آن در بحث علفهای هرز، برداشت و کنترل کیفیت محصولات کشاورزی مستقلاً بحث خواهیم کرد.
کنترل علفهای هرز به کمک بینایی کامپیوتری
مبارزه با علفهای هرز و حصول اطمینان از اینکه محصولات برای تولید، فضای کافی دارند از دغدغههای اصلی و دائمی کشاورزان است. سیستم اسپری نقطهای WeedSeeker در نیوزیلند درواقع یک حسگر تجاری با کاربرد کشاورزی است که با استفاده از فناوری دیود ساطع کننده نور، علفهای هرز را برای سمپاشی، شناسایی میکند.
برنامه تشخیص تصویر Xarvio یکی دیگر از فنآوریهای پیشرفته پیشآگاهی است که میتواند با دقت 61-100٪ برای شناسایی 123 نوع علفهای هرز از دوربین گوشیهای هوشمند شما استفاده کند.
برنامه Xarvio علاوه بر سیستم تجزیهوتحلیل خسارت برگ که آسیب برگها را بر اساس نسبت رنگ سبز تشخیص میدهد، میتواند بیماریهای مؤثر بر 37 محصول ذکرشده از این 123 محصول را نیز تشخیص داده و شناسایی کند.
برداشت به کمک بینایی کامپیوتری
برداشت خودکار، با استفاده از تجهیزات مختلف برای چیدن محصولات ظریف و بدون آسیب رساندن به آنها به کار میرود که چالشهای دیگری برای کشاورزان خصوصاً در سطح تجاری است.
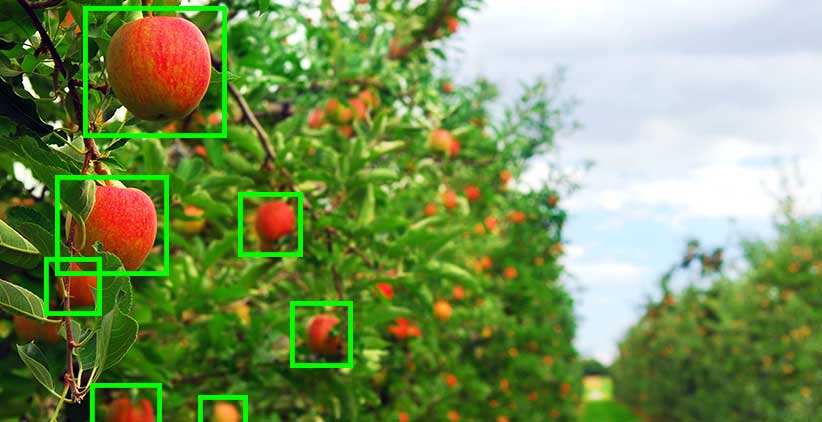
دستگاه برداشت خودکار در کشاورزی در سه سطح اساسی تشخیص میوه چون روش بینایی کامپیوتری، تشخیص مکان و تجهیزات برداشت فیزیکی برای برداشت و جدا کردن میوه از گیاه کاربرد دارد.
تشخیص میوه یکی از بزرگترین چالشها در مبحث هوش مصنوعی کشاورزی است که عمدتاً به دلیل شرایط بسیار متنوع برداشت، پیچیده است. نور غیرقابلپیشبینی، اشکال ناسازگار، ایجاد انسداد توسط شاخ و برگ یا میوههای دیگر، همه این عوامل و موارد دیگر باعث میشود که تشخیص میوه در مزرعه کار مشکلی باشد.
یک مقاله تحقیقاتی در نیوزلند که در شماره ماه مه سال 2019 مجله Biosystems Engineering منتشرشده است، طرحی را برای ماشین برداشت خودکار کیوی ارائه میدهد که از دوربینهای رنگی جفت شده و یادگیری عمیق همراه با دوربینهای استریو برای شناسایی و تعیین محل میوه برای برداشت استفاده میکند.
چهار بازوی مجهز به گیرندههای عمودی میوه را شناسایی میکنند، آنها را پیدا میکنند و سپس کیویها را گرفته و میپیچانند تا از ساقه جدا شوند.
در سال 2016 توسعهدهندگان شرکت Abundant Robotics اولین دستگاه خلأ را ایجاد کردند که از بینایی کامپیوتری برای شناسایی سیبها استفاده میکند و سپس آنها را از طریق یک لوله نرم با سرعت یک سیب در ثانیه به داخل میکشد.
انواع مختلف محصولات کشاورزی، به سختافزاری بسیار متفاوتی برای برداشت نیاز دارند. توتفرنگی مانند بسیاری از انواع میوههای حساس، یک برنامه برداشت بسیار فشرده را طلب میکند. Abundant Robotics یک شرکت مبتنی بر فناوری است که طیف وسیعی از روباتها را برای کمک به حل چالشهای برداشت توتفرنگی تولید میکند.
یکی از برجستهترین پروژههای Agrobot، ربات 24 بازوی برداشت محصول است که برای چیدن توتفرنگی طراحیشده است. Agrobot از فناوری یادگیری ماشینی برای شناسایی و اندازهگیری میزان رسیدن توتفرنگی استفاده میکند، سپس میوه را درست از بالای گل میچیند تا به ظروف برداشت منتقل کند. بهاینترتیب، ماشین برداشت هرگز درواقع با توتفرنگی تماس نمیگیرد و خطر آسیب یا کبودی را به حداقل میرساند.
درجهبندی محصول از طریق بینایی کامپیوتری
تضمین کیفیت و درجهبندی میوه، حتی ممکن است برای مطابقت با کارایی یک اپراتور انسانی به فنآوری بینایی کامپیوتری دقیقتر نیاز داشته باشد. فراتر از تشخیص میوه، برنامههای تضمین کیفیت ممکن است اندازه، مشخصات رنگ، رسیدگی و تشخیص نقص، شناسایی بیماریها و طبقهبندی میوه اسکن شده بر اساس این معیارها را اندازهگیری کنند.
تکنولوژیCrop tracker’s Harvest Quality Vision (تکنولوژی نظارت و ردیابی پیشرفت و کیفیت برداشت محصول) یک فناوری درجهبندی سیب با استفاده از یک دوربین نصبشده بر روی یک رایانه لوحی استاندارد iPad است که از طریق یک سطل سیب اسکن میشود تا اندازه، مشخصات رنگ و مقدار میوه را در دامنه قابلمشاهده تعیین کند.
سپس این سیستم میتواند سیبها را بر اساس اندازه و رنگی که توسط پرورشدهنده به سیستم ارائه میشود، سیبها را در دستههای برداشت سفارشی طبقهبندی کند.